Chapter 5: Force and Motion
1. What is a Force? Why does it matter?
-
A force is simply a push or a pull that one object (the agent) exerts on another.
-
Every force has magnitude (how strong) and direction → we treat forces as vectors.
-
Two broad families:
- Contact forces – need physical touch (e.g., friction, tension).
- Long-range forces – act at a distance (e.g., gravity, magnetism).
2. Net Force & Newton's Second Law
-
Net force = the vector sum of all forces acting on an object:
-
Experiments show:
- Acceleration grows in direct proportion to .
- For a given , heavier objects (more mass ) accelerate less.
-
Combining both ideas gives Newton's 2nd Law:
The acceleration points in the same direction as .
-
Units:
- Mass → kilograms (kg)
- Force → newtons (N) – one newton is .
3. Equilibrium & Newton's First Law
-
If no net force acts (), the object is in equilibrium:
- At rest → it stays at rest.
- Moving at constant velocity → it keeps that velocity.
- Written as: .
-
This is Newton's 1st Law ("law of inertia").
Key takeaway: motion itself needs no force to continue—only a change in motion needs force.
4. Everyday Forces to Recognise
| Symbol | Force name | Direction rule | Useful equation | Comment |
|---|---|---|---|---|
| Gravity | Straight down (toward Earth's centre) | Long-range | ||
| Spring | Toward spring's relaxed (equilibrium) length | — | Hooke's law appears later | |
| Tension | Along (and pulling) the string/rope | — | Same at every point in an ideal rope | |
| Normal | Perpendicular to the surface | — | "Support" force | |
| Kinetic friction | Parallel & opposite to sliding motion | Surface must be sliding | ||
| Static friction | Parallel & opposite to intended motion | Holds an object at rest |
Free-body diagram: draw the object alone, then add each of these forces with correct directions and labels. That picture is half the battle!
5. From Straight-Line Motion to Rotation – Introducing Torque
-
A force can also twist an object about a pivot.
-
We measure this twisting tendency with torque :
where:
- = position vector from the pivot to where the force is applied,
- = vector (cross) product.
-
Magnitude:
- = angle between and .
- = shortest (perpendicular) distance from pivot to the force's line of action.
-
Sign convention (viewing +z coming out of the page):
- Counter-clockwise (CCW) twist →
- Clockwise (CW) twist →
-
Component trick: sometimes it is faster to resolve into - and -parts and add their torques:
6. Net Torque
Just like forces, torques add:
The net torque tells you the overall rotational effect of all forces on the object.
7. Quick Practice (try before peeking!)
A. The square plate shown on the left has a pivot point O at its centre. If , , and , what is the net torque?
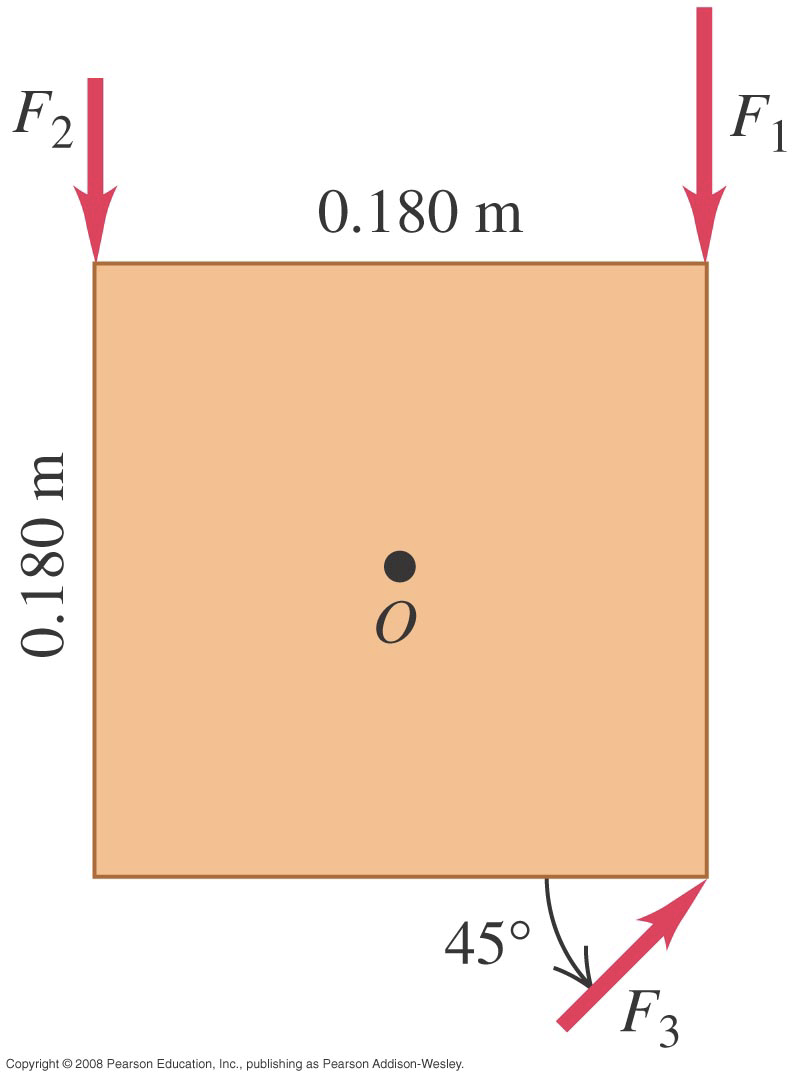
Using the torque formula for each force:
For (26 N):
- Distance from pivot to force application point:
- Angle between force and position vector:
- Torque: (CW)
For (14 N):
- Distance from pivot to force application point:
- Angle between force and position vector:
- Torque: (CCW)
For (18 N):
- Distance from pivot to force application point:
- Angle between force and position vector:
- Torque: (CCW)
Net torque: (CCW)
B. The pulley shown on the right has a mass of and a diameter of . The pulley has a pivot point O located half way between its center and its rim. A rope holding two masses wraps around the pulley. What is the net torque?
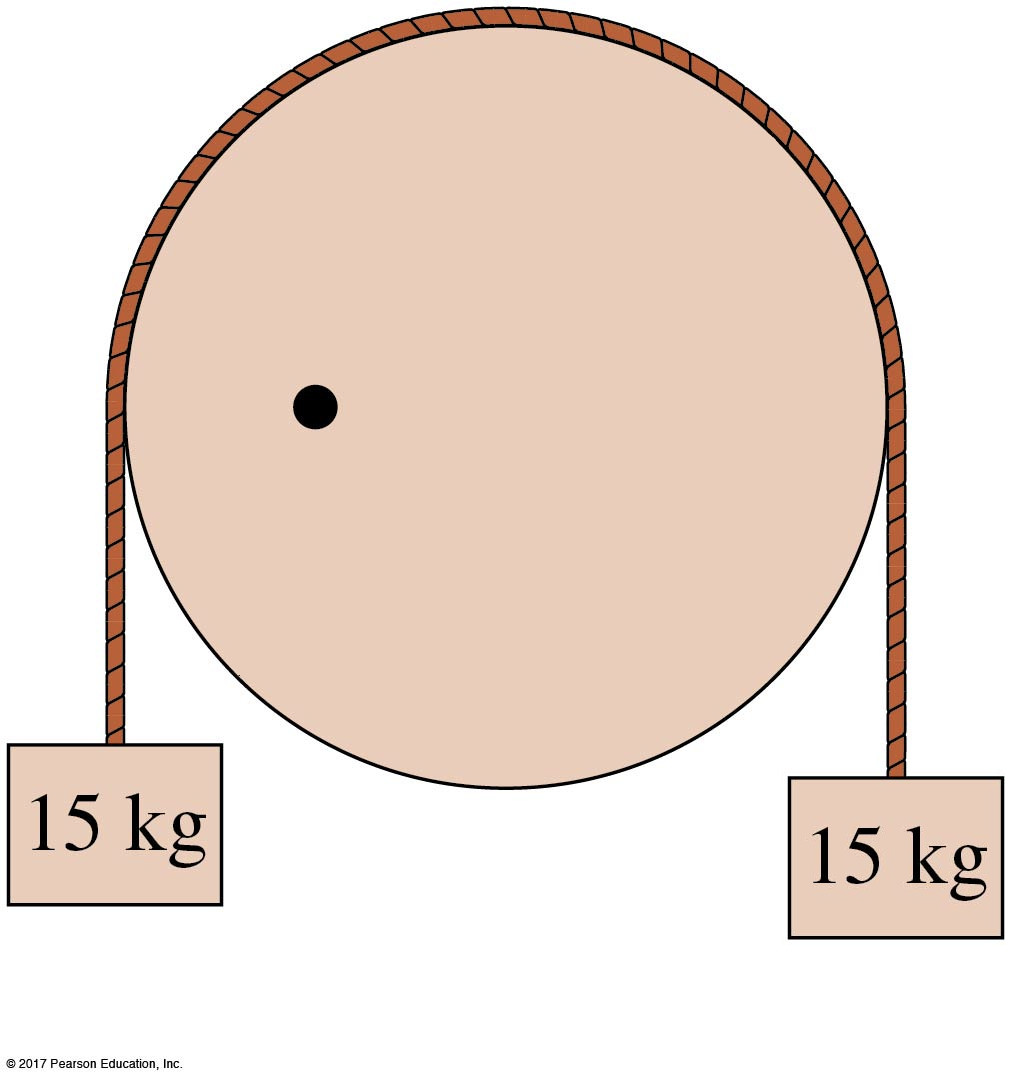
We need to calculate the torque from the pulley's weight and the two hanging masses:
For the mass on the left:
- Force:
- Distance from pivot to force line of action:
- Angle between force and moment arm:
- Torque: (CCW)
For the pulley's weight ():
- Force:
- Distance from pivot to center of mass:
- Angle between force and moment arm:
- Torque: (CW)
For the mass on the right:
- Force:
- Distance from pivot to force line of action:
- Angle between force and moment arm:
- Torque: (CW)
Net torque: (CW)
8. Key Points to Remember
- Draw a free-body diagram first—it clarifies both linear and rotational problems.
- For straight-line motion, relate to via Newton's 2nd law.
- For rotation, replace forces with torques about the chosen pivot, then sum them.
- Zero net force no linear acceleration; zero net torque no angular acceleration.
- Sign conventions (for torque directions) keep results consistent—pick one and stick to it.
Feel free to ask for more examples, deeper derivations, or practice problems!